IPCC比赛的时候,发现用hash map会比红黑树的map慢。感觉不对劲,我hash空间声明大,冲突不就低了吗?
hash的相关基本知识 散列表的装填因子定义为^1 :
$α= 填入表中的元素个数 / 散列表的长度$
α是散列表装满程度的标志因子。
由于表长是定值,α与“填入表中的元素个数”成正比,所以,
α越大,填入表中的元素较多,产生冲突的可能性就越大;
α越小,填入表中的元素较少,产生冲突的可能性就越小。
unordered_map定义 在插入 元素时,根据待插入元素的关键码,以hashfunc计算出该元素的存储位置,在结构中按此位置进行存放
在搜索 元素时,对关键码进行同样的计算,把求得的函数值当做元素的存储位置,在结构中按此位置去元素比较,若关键码相等,则搜索成功
C++11 定义了std::hash
1 2 3 4 5 6 7 template < class Key , class T , class Hash = std::hash<Key>, class KeyEqual = std::equal_to<Key>, class Allocator = std::allocator< std::pair<const Key, T> > > class unordered_map;
很明显可以reserve设置大小
unordered_map详解 ^2
自定义结构体hash函数 hashfunc设计原则 哈希函数的定义域必须包括需要存储的全部关键码,而如果散列表允许m个地址时,其值域必须在0-(m-1)之间
哈希函数计算出来的地址能均匀分布在整个空间中
哈希函数应该比较简单
举例 如果想让自定义的class作为key(unordered_map<key,value>)来使用unordered_map,需要实现^3 :
哈希函数,需要实现一个class重载operator(),将自定义class变量映射到一个size_t类型的数。一般常用std::hash模板来实现。
For two parameters k1 and k2 that are equal , std::hash<Key>()(k1) == std::hash<Key>()(k2).
For two different parameters k1 and k2 that are not equal , the probability that std::hash<Key>()(k1) == std::hash<Key>()(k2) should be very small , approaching 1.0/std::numeric_limits<std::size_t>::max().
判断两个自定义class类型的key变量是否相等的函数,一般在自定义class里重载operator==。
1 2 3 4 5 6 7 8 9 10 11 12 13 template <> struct hash <Myclass> { size_t operator () (const Myclass &k) const { int h = k.first; for (auto x : k.second) { h ^= x; } return h; } };
或者
1 2 3 4 5 6 7 8 struct MyHash { size_t operator () (const pair<int ,int >& p) const { return hash <long long >()( (static_cast <long long >(x.first) ) ^ ( (static_cast <long long >(x.first))<<32 ) ); } };
防止冲突的自定义hash 防止黑客攻击^4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 struct custom_hash { static uint64_t splitmix64 (uint64_t x) x += 0x9e3779b97f4a7c15 ; x = (x ^ (x >> 30 )) * 0xbf58476d1ce4e5b9 ; x = (x ^ (x >> 27 )) * 0x94d049bb133111eb ; return x ^ (x >> 31 ); } size_t operator () (uint64_t x) const static const uint64_t FIXED_RANDOM = chrono::steady_clock::now ().time_since_epoch ().count (); return splitmix64 (x + FIXED_RANDOM); } };
结构体万能hash 解释见转载的作者
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 template <typename T>inline void hash_combine (size_t & seed, const T& val) seed ^= std::hash <T>()(val) + 0X9E3779B9 + (seed << 6 ) + (seed >> 2 ); } template <typename T>inline void hash_val (size_t & seed, const T& val) hash_combine (seed, val); } template <typename T, typename ... Types>inline void hash_val (size_t & seed, const T& val, const Types&... args) hash_combine (seed, val); hash_val (seed, args...); } template <typename ... Types>inline size_t hash_val (const Types&... args) size_t seed = 0 ; hash_val (seed, args...); return seed; } class MyObject {public : string a; char b; unsigned c; bool operator ==(const MyObject& rhs) const { return a == rhs.a && b == rhs.b && c == rhs.c; } bool operator !=(const MyObject& rhs) const { return !operator ==(rhs); } friend ostream& operator <<(ostream& os, const MyObject& ptr) { return os << ptr.a << " " << ptr.b << " " << ptr.c << endl; } }; class MyHashFunction {public : std::size_t operator () (const MyObject& obj) const { return hash_val (obj.a, obj.b, obj.c); } };
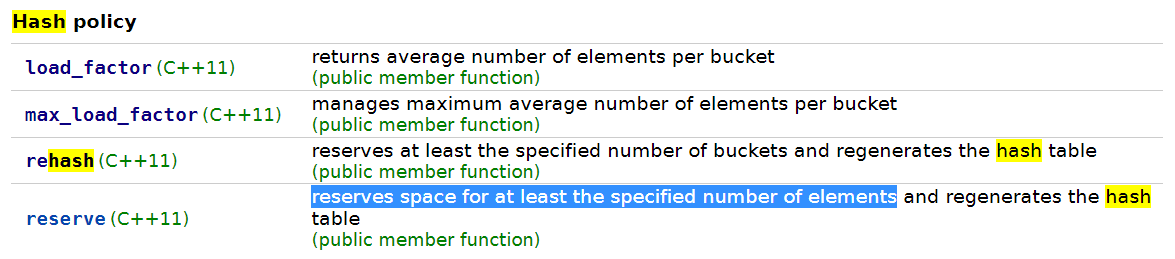
unordered_map性能 加快 std::unorderd_map 的速度 为了避免动态改变哈希表的大小,可以预估容器中带插入元素的数量,并且预先申请好内存空间,避免动态分配过程中造成的 rehash 现象。当容器中的总元素超出了填充因子时,容器会重新申请更大的内存扩充桶的数量,然后重新哈希。
例如,我会预先调用 reverse 成员函数预先分配内存空间,以及设置好最大填充因子。
1 2 3 unordered_map<int ,int > hash; mp.reserve (1024 ); mp.max_load_factor (0.25 );
但是没什么用?
Google 开源的 abesil flat hash map Google 则采用了开放寻址法中最简单的线性探测方法来解决哈希碰撞,取得了更快的速度。
开放定址法,当哈希表未满,在插入同义字时,可以把key值 存放在下一个空位置(线性探测)
更快,解释开发寻址法,cache更优秀
高性能 https://github.com/greg7mdp/parallel-hashmap
https://github.com/greg7mdp/sparsepp
参考文献