面向过程 VS 面向对象
面向过程
面向过程是一种以事件为中心的编程思想,编程的时候把解决问题的步骤分析出来,然后用函数把这些步骤实现,在一步一步的具体步骤中再按顺序调用函数。
面向对象
在日常生活或编程中,简单的问题可以用面向过程的思路来解决,直接有效,但是当问题的规模变得更大时,用面向过程的思想是远远不够的。所以慢慢就出现了面向对象的编程思想。世界上有很多人和事物,每一个都可以看做一个对象,而每个对象都有自己的属性和行为,对象与对象之间通过方法来交互。面向对象是一种以“对象”为中心的编程思想,把要解决的问题分解成各个对象,建立对象的目的不是为了完成一个步骤,而是为了描叙某个对象在整个解决问题的步骤中的属性和行为。
优缺点
面向过程
优点:
- 流程化使得编程任务明确,在开发之前基本考虑了实现方式和最终结果,具体步骤清楚,便于节点分析。
- 效率高,面向过程强调代码的短小精悍,善于结合数据结构来开发高效率的程序。
缺点:
- 需要深入的思考,耗费精力,代码重用性低,扩展能力差,后期维护难度比较大。
面向对象
优点:
- 结构清晰,程序是模块化和结构化,更加符合人类的思维方式;
- 易扩展,代码重用率高,可继承,可覆盖,可以设计出低耦合的系统;
- 易维护,系统低耦合的特点有利于减少程序的后期维护工作量。
缺点:
- 开销大,当要修改对象内部时,对象的属性不允许外部直接存取,所以要增加许多没有其他意义、只负责读或写的行为。这会为编程工作增加负担,增加运行开销,并且使程序显得臃肿。
- 性能低,由于面向更高的逻辑抽象层,使得面向对象在实现的时候,不得不做出性能上面的牺牲,计算时间和空间存储大小都开销很大。
静态语言 vs 动态语言
- Dynamic Programming Language (动态语言或动态编程语言)
- 动态语言,准确地说,是指程序在运行时可以改变其结构:新的函数可以被引进,已有的函数可以被删除等在结构上的变化。
- 比如众所周知的ECMAScript(JavaScript)便是一个动态语言。
- 除此之外如Ruby、Python等也都属于动态语言,而C、C++等语言则不属于动态语言。
- Dynamically Typed Language (动态类型语言)
- 动态类型语言:是指在运行期间才去做数据类型检查的语言。
- 在用动态语言编程时,不用给变量指定数据类型,该语言会在你第一次赋值给变量时,在内部将数据类型记录下来。
- Statically Typed Language (静态类型语言)
- 静态类型语言:与动态类型语言刚好相反,它的数据类型检查发生在在编译阶段,也就是说在写程序时要声明变量的数据类型。
- C/C++、C#、JAVA都是静态类型语言的典型代表。
两者的优缺点
静态类型语言的
- 主要优点在于其结构非常规范,便于调试,方便类型安全;
- 缺点是为此需要写更多的类型相关代码,导致不便于阅读、不清晰明了。
动态类型语言的
- 优点在于方便阅读,不需要写非常多的类型相关的代码;
- 缺点自然就是不方便调试,命名不规范时会造成读不懂,不利于理解等。
runtime
runtime 描述了程序运行时候执行的软件/指令, 在每种语言有着不同的实现。
可大可小,在 C 中,runtime 是库代码, 等同于 C runtime library,一系列 C 程序运行所需的函数。
在 Java 中,runtime 还提供了 Java 程序运行所需的虚拟机等。
总而言之,runtime 是一个通用抽象的术语,指的是计算机程序运行的时候所需要的一切代码库,框架,平台等。
Go中的 runtime
在 Go 中, 有一个 runtime 库,其实现了垃圾回收,并发控制, 栈管理以及其他一些 Go 语言的关键特性。 runtime 库是每个 Go 程序的一部分,也就是说编译 Go 代码为机器代码时也会将其也编译进来。所以 Go 官方将其定位偏向类似于 C 语言中的库。
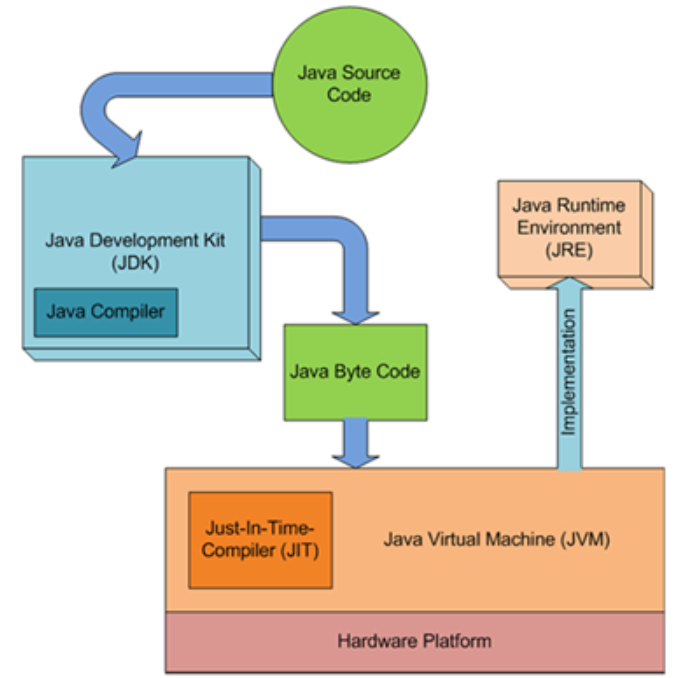
Go 中的 runtime 不像 Java runtime (JRE, java runtime envirement ) 一样,jre 还会提供虚拟机, Java 程序要在 JRE 下 才能运行。
垃圾回收机制(garbage collection,GC)的设计
C/C++语言为什么没有对指针对象的垃圾回收机制
作为支持指针的编程语言,C++将动态管理存储器资源的便利性交给了程序员。在使用指针形式的对象时(请注意,由于引用在初始化后不能更改引用目标 的语言机制的限制,多态性应用大多数情况下依赖于指针进行),程序员必须自己完成存储器的分配、使用和释放,语言本身在此过程中不能提供任何帮助。
某些语言提供了垃圾回收机制,也就是说程序员仅负责分配存储器和使用,而由语言本身负责释放不再使用的存储器,这样程序员就从讨厌的存储器管理的工作中脱身了。
C++的设计者Bjarne Stroustrup对此做出过解释:
“我有意这样设计C++,使它不依赖于自动垃圾回收(通常就直接说垃圾回收)。这是基于自己对垃圾回收系统的经验,我很害怕那种严重的空间和时间开销,也害怕由于实现和移植垃圾回收系统而带来的复杂性。还有,垃圾回收将使C++不适合做许多底层的工作,而这却正是它的一个设计目标。但我喜欢垃圾回收 的思想,它是一种机制,能够简化设计、排除掉许多产生错误的根源。
需要垃圾回收的基本理由是很容易理解的:用户的使用方便以及比用户提供的存储管理模式更可靠。而反对垃圾回收的理由也有很多,但都不是最根本的,而是关于实现和效率方面的。
已经有充分多的论据可以反驳:每个应用在有了垃圾回收之后会做的更好些。类似的,也有充分的论据可以反对:没有应用可能因为有了垃圾回收而做得更好。
并不是每个程序都需要永远无休止的运行下去;并不是所有的代码都是基础性的库代码;对于许多应用而言,出现一点存储流失是可以接受的;许多应用可以管理自己的存储,而不需要垃圾回收或者其他与之相关的技术,如引用计数等。
我的结论是,从原则上和可行性上说,垃圾回收都是需要的。但是对今天的用户以及普遍的使用和硬件而言,我们还无法承受将C++的语义和它的基本库定义在垃圾回收系统之上的负担。”
强类型语言和弱类型语言
1.强类型语言:使之强制数据类型定义的语言。没有强制类型转化前,不允许两种不同类型的变量相互操作。强类型定义语言是类型安全的语言,如Rust, Java、C# 和 Python,比如Java中“int i = 0.0;”是无法通过编译的;
2.弱类型语言:数据类型可以被忽略的语言。与强类型语言相反, 一个变量可以赋不同数据类型的值,允许将一块内存看做多种类型,比如直接将整型变量与字符变量相加。**C/C++**、PHP都是弱类型语言,比如C++中“int i = 0.0;”是可以编译运行的;
注意,强类型语言在速度上略逊色于弱类型语言,使用弱类型语言可节省很多代码量,有更高的开发效率。而对于构建大型项目,使用强类型语言可能会比使用弱类型更加规范可靠。
ispc
a data-parallel languagedesigned specifically to target Intel’s vector extensions
Intel® Implicit SPMD Program Compiler
An open-source compiler for high-performance SIMD programming on the CPU and GPU
ispc is a compiler for a variant of the C programming language, with extensions for “single program, multiple data“ (SPMD) programming.
需要进一步的研究学习
暂无
遇到的问题
暂无
开题缘由、总结、反思、吐槽~~
参考文献
https://blog.csdn.net/yuanmengong886/article/details/52572533
https://segmentfault.com/a/1190000022715733